Kshirsagar, A., Kress-Gazit, H., & Hoffman, G. (2019).
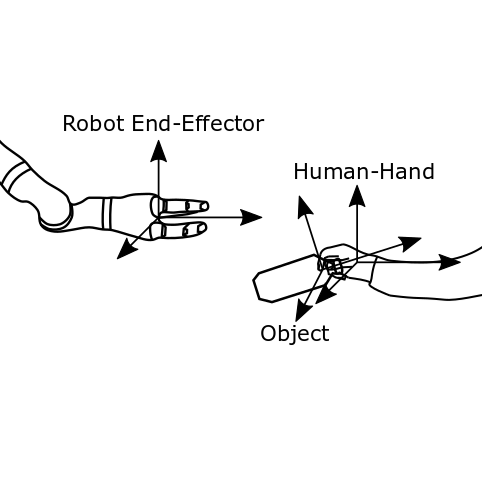
Specifying and Synthesizing Human-Robot Handovers
In Proc. of the
IEEE/RSJ International Conference on Intelligent Robots and Systems
Full text
DOI
Share
|
AbstractWe present a controller for human-robot handovers that is automatically synthesized from high-level specifications in Signal Temporal Logic (STL). In contrast to existing controllers, this approach can provide formal guarantees on the timing of each of the handover phases. Using synthesis also allows end-users to specify and dynamically change the robot’s behaviors using high-level requirements of goals and constraints rather than by tuning low-level controller parameters. We illustrate the proposed approach by replicating the behavior of existing handover strategies from the literature. We also identify specification parameters that are likely to lead to successful handovers using a public database of human-human handovers. |