Chen, J., Kshirsagar, A., Heller, F., G´omez Andreu, M., Belousov, B., Schneider, T., Lin, L. P. Y., Doerschner, K., Drewing, K., & Peters, J. (2025).
Active Sampling for Hardness Classification with Vision-Based Tactile Sensors
German Robotics Conference (GRC)
Full text
Share
|
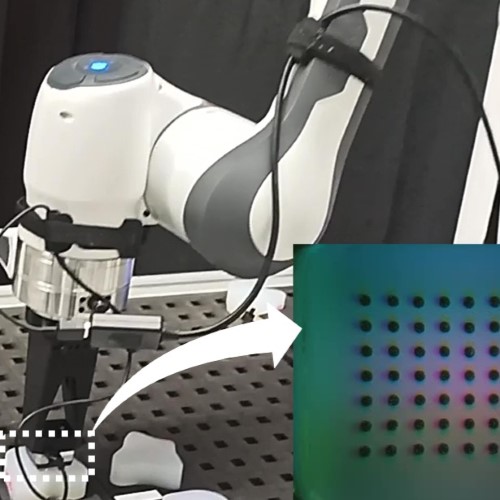
AbstractHardness is a key tactile property perceived by humans and robots. In this work, we investigate information- theoretic active sampling for efficient hardness classification using vision-based tactile sensors. We assess three probabilistic classifiers and two uncertainty-based sampling strategies on a robotic setup and a human-collected dataset. Results show that uncertainty-driven sampling outperforms random sampling in accuracy and stability. While human participants achieve 48.00% accuracy, our best method reaches 88.78% on the same objects, highlighting the effectiveness of vision-based tactile sensors for hardness classification. |