Full text
Share
|
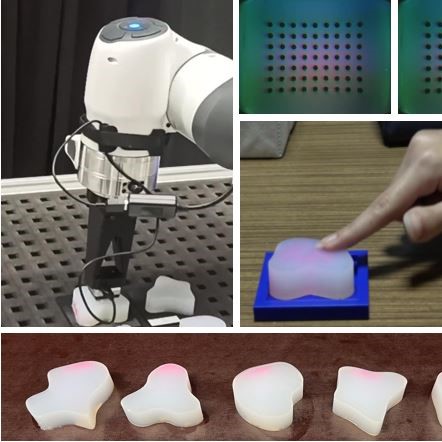
AbstractHumans can classify deformable materials according to their hardness similarity, but existing robotic approaches focus on hardness recognition or absolute hardness prediction. In this work, we investigate hardness similarity detection using a vision-based tactile sensor (VBTS) and evaluate three methods: optical flow features and support vector machine (SVM) classifier, DINOv2 features and SVM classifier, and convolutional long short term memory (ConvLSTM) network trained with categorical cross-entropy loss. To evaluate these methods, we created a dataset of over 200 videos by pressing a GelSight Mini sensor, attached to a Franka-Panda robot, on five silicone objects of varying hardness, and also conducted a human-participant study showing humans achieved 80.25% average accuracy in hardness similarity detection. The three methods achieved average accuracies of 77.66%, 67.00%, and 70.00% with 15 samples per object, demonstrating that a VBTS can effectively classify objects based on hardness similarity. |