Full text
Source code
Share
|
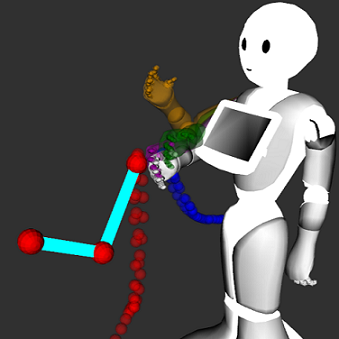
AbstractShared dynamics models are important for capturing the complexity and variability inherent in Human-Robot Interaction (HRI). Therefore, learning such shared dynamics models can enhance coordination and adaptability to enable successful reactive interactions with a human partner. In this work, we propose a novel approach for learning a shared latent space representation for HRIs from demonstrations in a Mixture of Experts fashion for reactively generating robot actions from human observations. We train a Variational Autoencoder (VAE) to learn robot motions regularized using an informative latent space prior that captures the multimodality of the human observations via a Mixture Density Network (MDN). We show how our formulation derives from a Gaussian Mixture Regression formulation that is typically used approaches for learning HRI from demonstrations such as using an HMM/GMM for learning a joint distribution over the actions of the human and the robot. We further incorporate an additional regularization to prevent “mode collapse”, a common phenomenon when using latent space mixture models with VAEs. We find that our approach of using an informative MDN prior from human observations for a VAE generates more accurate robot motions compared to previous HMM-based or recurrent approaches of learning shared latent representations, which we validate on various HRI datasets involving interactions such as handshakes, fistbumps, waving, and handovers. Further experiments in a real-world human-to-robot handover scenario show the efficacy of our approach for generating successful interactions with four different human interaction partners. |