Full text
DOI
Share
|
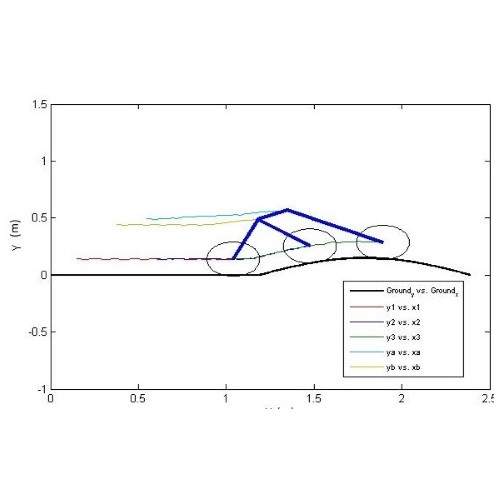
AbstractPlanetary rovers offer promising alternatives for conducting in-situ experiments on other planets. Considering the huge costs of such exploration missions, it becomes necessary to design an optimal mobility system configuration to meet the mission goals. In this paper, a constrained optimization procedure is presented to obtain optimal design parameters of rocker-bogie mobility system. More recently, researchers have proposed the idea of using reconfigurable wheels, which would be able to change their shape according to the terrain, to improve rover’s performance. One of the major challenges in implementation of such wheels is their control and autonomy. To avoid complex on-board calculations, the method of using look-up table for autonomously changing the wheel dimensions is proposed in this paper. For obtaining this look-up table, physics based motion dynamics simulation model is developed, incorporating the wheel-soil contact mechanics and motion dynamics of the rocker bogie mobility system. The simulated motion of rocker bogie is found to be in conformance with the ground profile. Performance metrics like slip ratio, effective ground pressure and power consumption are evaluated through the motion simulations. Finally, a lookup table for autonomous shape changing wheels is presented for certain terrain characteristics. |