|
Learning Dynamic Motor SkillsTU Darmstadt, GermanyJuly 2022 - Ongoing Collaborators: Kai Ploeger (TU Darmstadt), Alap Kshirsagar (TU Darmstadt), Abir Chowdhury (JLU Gießen), Hermann Mueller (JLU Gießen), and Jan Peters (TU Darmstadt) |
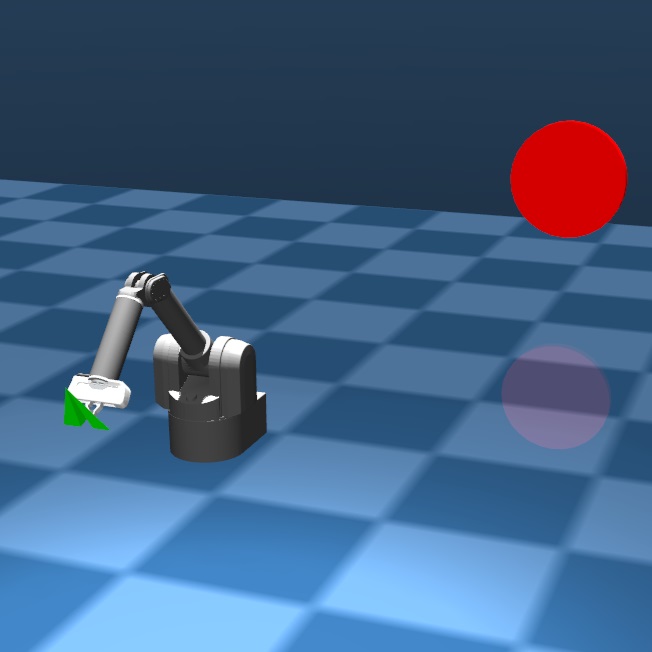
Mastering dynamic motor skills is crucial for both humans and robots to interact effectively with their environment. This project explores how complex movements can be learned, adapted, and optimized in dynamic settings. By investigating tasks that require precise coordination, prediction, and real-time adjustment—such as throwing, catching, and juggling—we aim to uncover fundamental principles of motor learning. Our approach integrates machine learning, biomechanics, and neuroscience to develop models that capture the adaptability and efficiency of human movement. Ultimately, this research contributes to advancing both robotic control and our understanding of human motor intelligence.
Publications
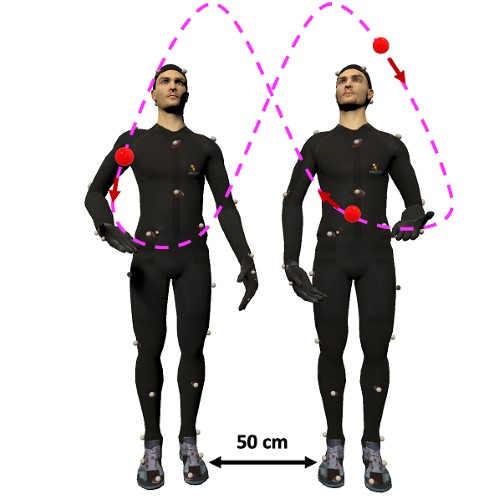
Chowdhury, A., Maurer, H., Kshirsagar, A., Ploeger, K., Peters, J., Mueller, H., & Maurer, L.K., The Earlier You Know, the Smoother You Act: Anticipatory Control in Solo and Dyadic Juggling, Experimental Brain Research, 2026
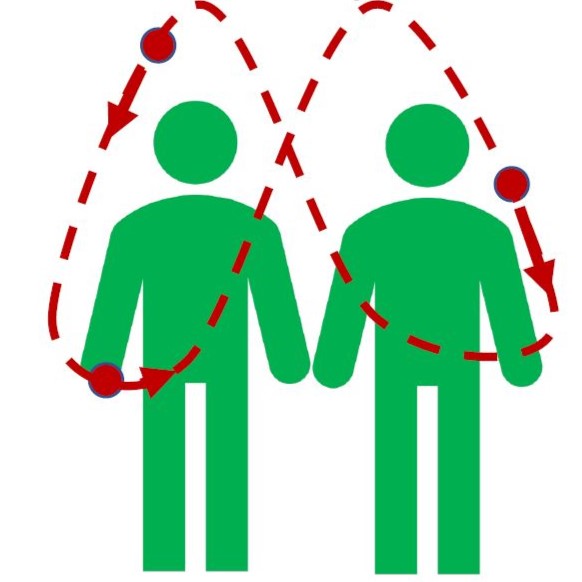
Chowdhury, A., Maurer, H., Kshirsagar, A., Ploeger, K., Peters, J., & Mueller, H., The Earlier You Know, the Smoother You Act, Conference of the Motor Behavior Section of the German Society of Sport Science, 2025

Kornmann, M., He, Q., Kshirsagar, A., Ploeger, K., & Peters, J., Learning to Accurately Throw Paper Planes, Workshop on Learning Robot Fine and Dexterous Manipulation: Perception and Control at Conference on Robot Learning (CoRL), 2024