Projects
Robotics



Others
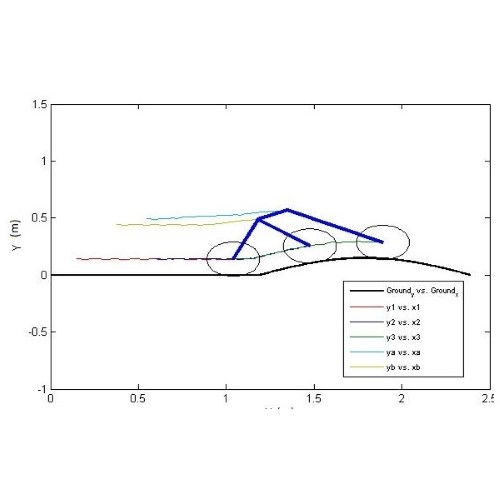
 Characterizing Height-Induced Adaptation of Postural Control
Characterizing Height-Induced Adaptation of Postural Control
TU Darmstadt, Germany |
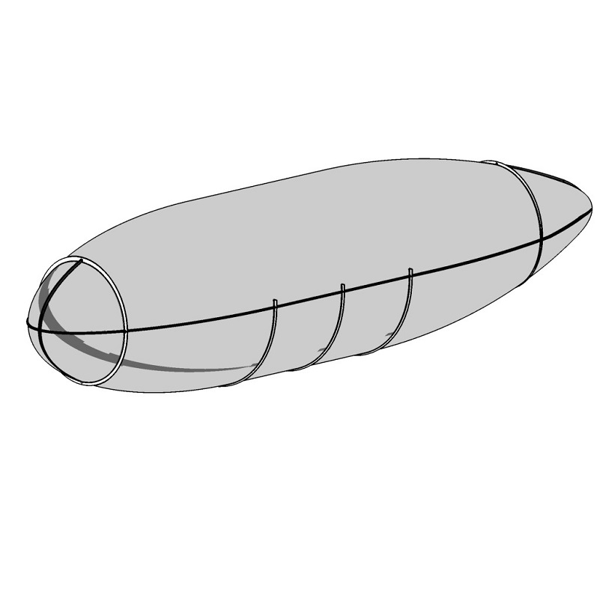 Dismantle-able Semi-Rigid Airship
Dismantle-able Semi-Rigid Airship
IIT Bombay, India |
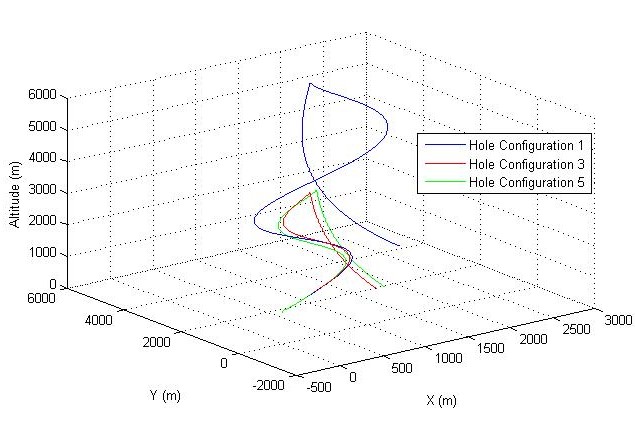 Trajectory Simulation of Breakaway Aerostats
Trajectory Simulation of Breakaway Aerostats
IIT Bombay, India |
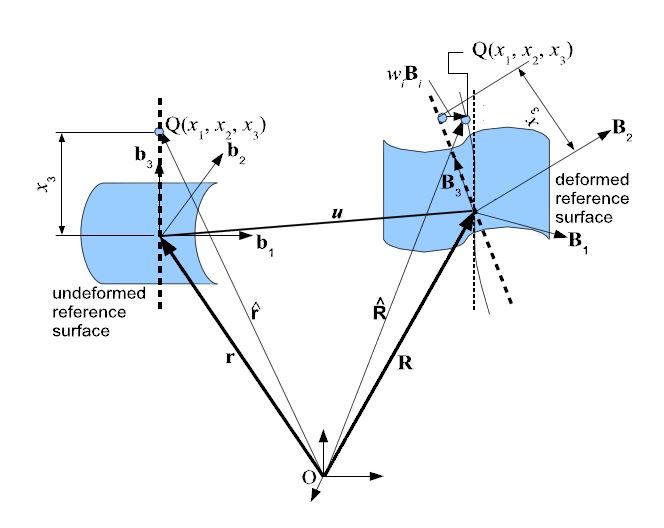 VAM based modelling of Film-Fabric Laminates
VAM based modelling of Film-Fabric Laminates
IISc Bangalore, India |
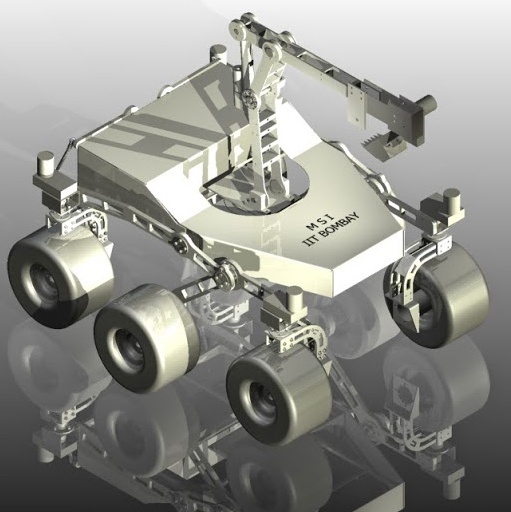
 Design of Fabric Cutting Machine for Mat-making Handlooms
Design of Fabric Cutting Machine for Mat-making Handlooms
IIT Bombay, India |