|
Human-Robot Joint Task Execution with Non-verbal CommunicationCornell University, USACourse Project, MAE 6710 - Human-Robot Interaction, Fall 2017 Advisor: Dr. Guy Hoffman October 2017 - December 2017 Collaborators: Alap Kshirsagar (Cornell), Julia Chen (Cornell) |
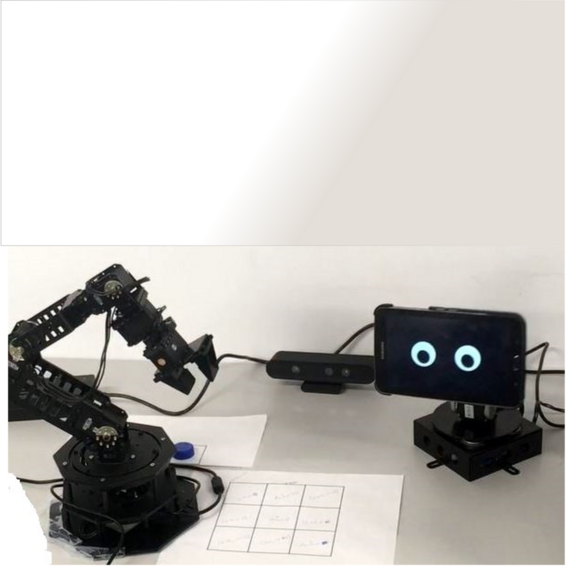
Built a platform for human-robot collaborative task execution by combining off-the-shelf robot arm, simple-head robot and a vision sensor. Connected these individual components through a main controller in ROS framework
Developed high-level decision-making algorithm based on teamwork requirements found in HRI literature
Conducted human-subject experiments to compare the likeability and task efficiency of robot arm with and without the tablet-head
Project Report: PDF