|
Parinat - IIT Bombay's Small Humanoid Robot ProjectIIT Bombay, IndiaHead of Mechanical Subsystem September 2012 - May 2014 |
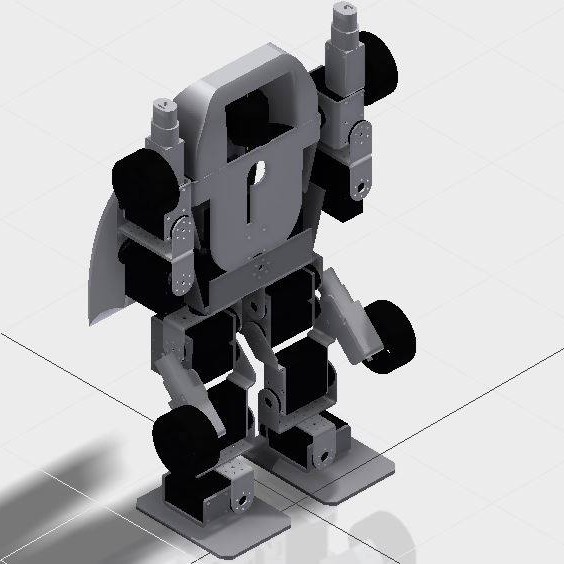
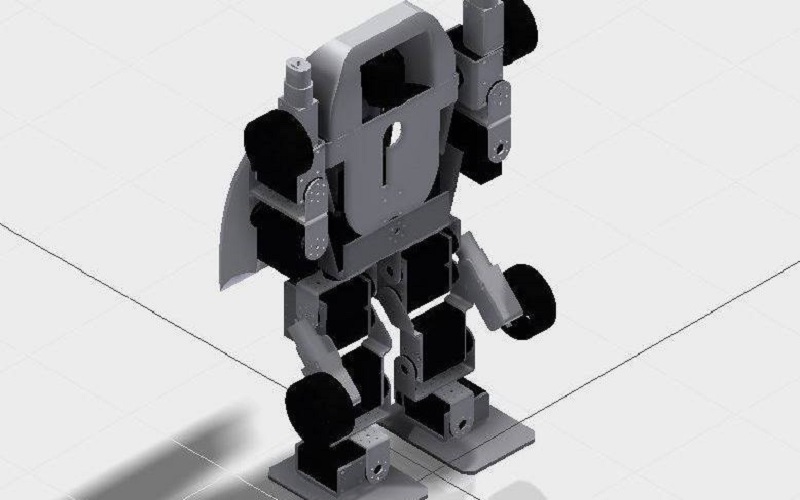
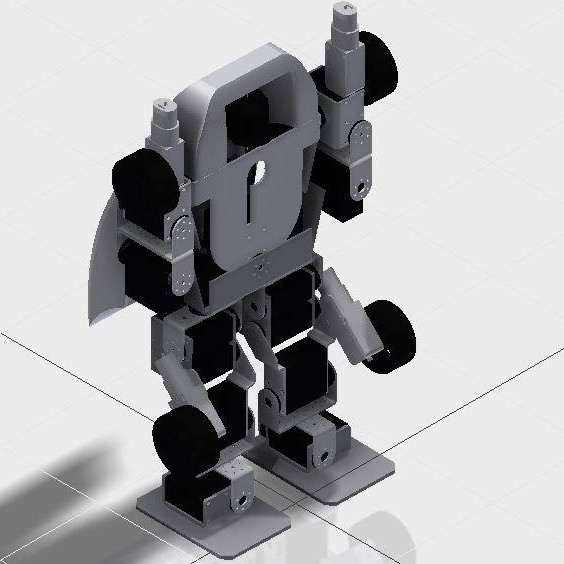
Conceptualized and built a small size humanoid robot with 12 degrees of freedom, capable of demonstrating basic human motions like straight walking and turning
Performed motion simulations and stress analysis of detailed CAD models of robot for deciding actuator torque requirements and gait sequence
More about Parinat
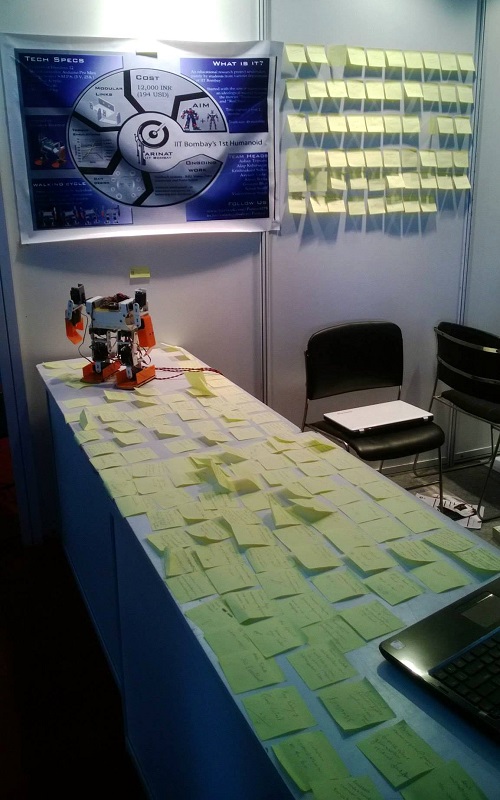
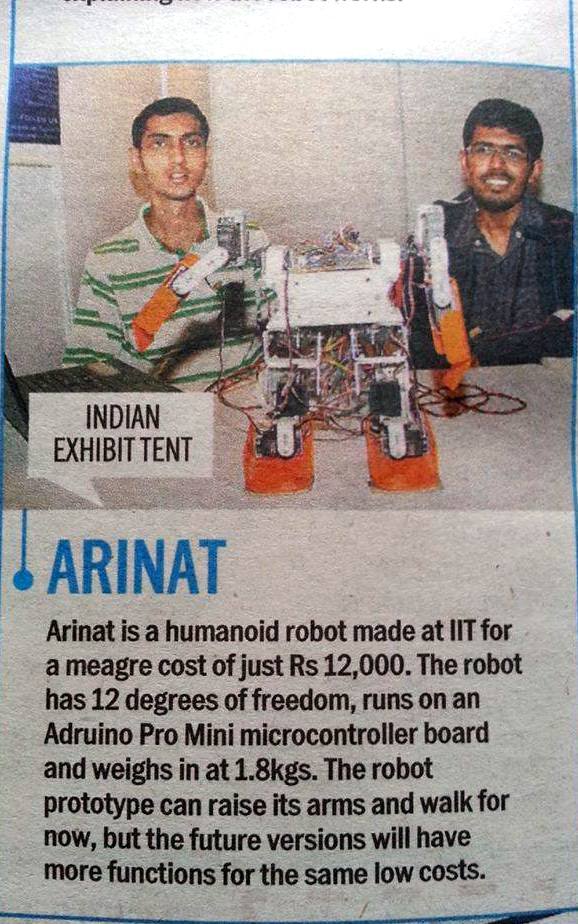
Photos of 'Parinat'
Publications
Kshirsagar, A., Tejwani, A., Singh, V., Bhat, G., Singh, N., Yadav, A., Berlia, A., Saboo, K., Patil, U. & Prasad S., Mechatronic Design, Fabrication and Analysis of a Small-Size Humanoid Robot-Parinat, ICDMM, 2014