|
Timing-specified Controllers for Human-Robot handoversCornell University, USAJanuary 2021 - September 2022 Collaborators: Alap Kshirsagar (Cornell), Rahul Kumar Ravi (Cornell), Hadas Kress-Gazit (Cornell), and Guy Hoffman (Cornell) |
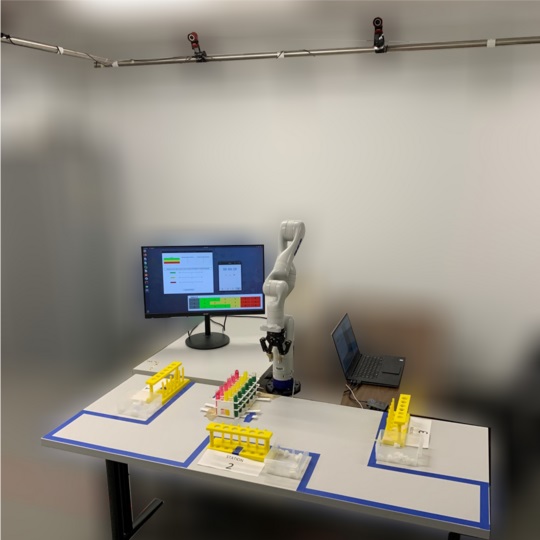
In this project, we develop and evaluate human-robot handover controllers that allow end-users to specify timing parameters for the robot reach motion, and that provide feedback if the robot cannot satisfy those constraints. End-user tuning with feedback is a useful controller feature in settings where robots have to be re-programmed for varying task requirements but end-users do not have programming knowledge.
Publications
*Kshirsagar, A., *Ravi R. K., Kress-Gazit, H., & Hoffman, G., Timing-Specified Controllers with Feedback for Human-Robot Handovers, IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2022