|
Design Optimization and Motion Dynamics of Mobility System for Planetary RoverIIT Bombay, IndiaUndergraduate Thesis at Department of Mechanical Engineering Advisor: Prof. Anirban Guha August 2013 - April 2014 |
Evaluated and compared the performance of various mobility systems based on metrics like obstacle
climbing capability, power consumption and effective ground pressure
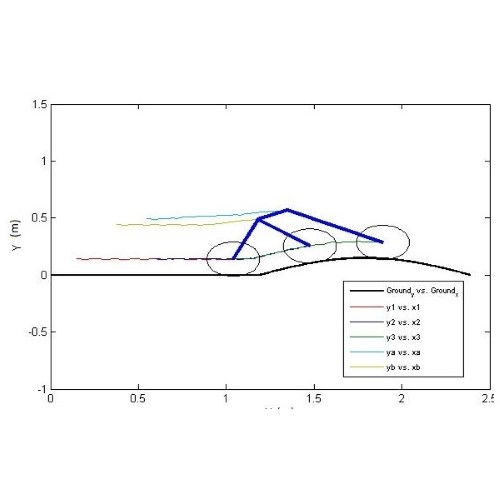
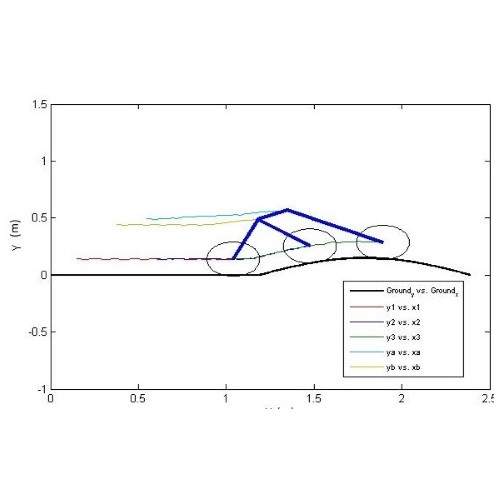
Developed a physics based motion dynamics simulation tool in MATLAB, incorporating the forward
dynamics of rocker bogie system, wheel-soil interaction mechanics and drive motor characteristics
Analysed the effect of wheel dimensions on mobility performance of rocker bogie system and devised
look-up tables for autonomous reconfiguration of wheel dimensions
Publications
Kshirsagar, A. & Guha, A., Design Optimization of Rocker Bogie System and Development of Look-Up Table for Reconfigurable Wheels for a Planetary Rover, International Journal of Vehicle Structures and Systems, 2016
Kshirsagar, A., Design Optimization and Motion Dynamics of Mobility System for Mars Rover, Bachelor's Thesis, IIT Bombay, 2014