|
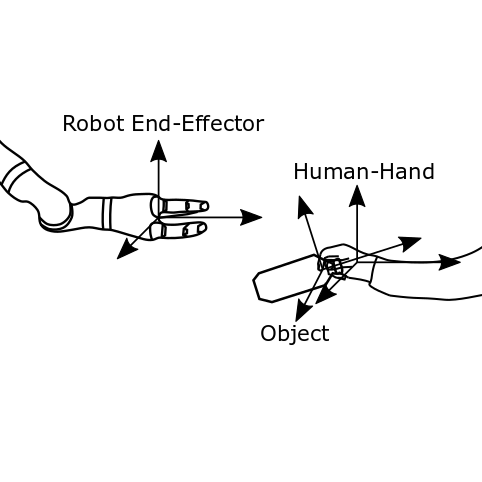
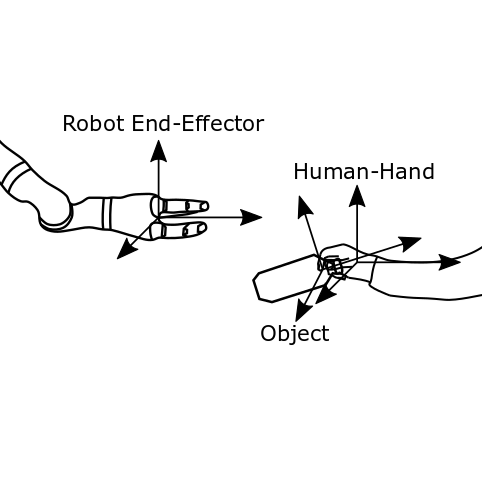
Specifying and Synthesizing Human-Robot Object HandoversCornell University, USAJanuary 2018 - November 2019 Collaborators: Alap Kshirsagar (Cornell), Hadas Kress-Gazit (Cornell), and Guy Hoffman (Cornell). |
In this project, we investigate human-robot handover controllers that are automatically synthesized from high-level specifications. In contrast to existing controllers, this approach can provide formal guarantees on the timing of each of the handover phases. Using synthesis also allows end-users to specify and dynamically change the robot’s behaviors using high-level requirements of goals and constraints rather than by tuning low-level controller parameters.
Publications
Kshirsagar, A., Kress-Gazit, H., & Hoffman, G., Specifying and Synthesizing Human-Robot Handovers, IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019
Kshirsagar, A., Kress-Gazit, H. & Hoffman, G., Human-Robot Handovers with Signal Temporal Logic Specifications, IEEE International Conference on Robot and Human Interactive Communication - Late Breaking Report, 2019
🏆Best Late Breaking Report