|
Tactile Perception of Object PropertiesTU Darmstadt, GermanyJuly 2022 - Ongoing Collaborators: Alap Kshirsagar (TU Darmstadt), Lisa P. Y. Lin (JLU Gießen), Boris Belousov (DFKI SAIROL), Tim Schneider (TU Darmstadt), Katja Doershner (JLU Gießen), Knut Drewing (JLU Gießen) and Jan Peters (TU Darmstadt) |
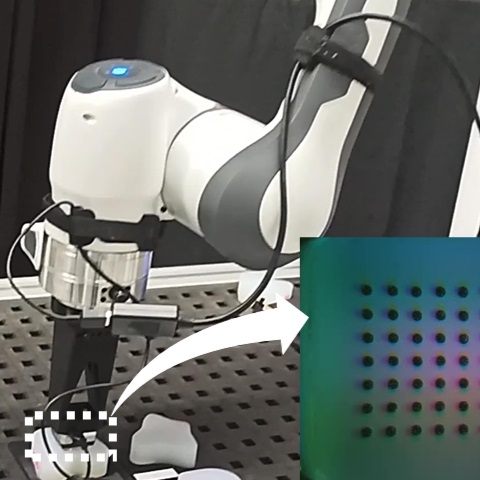
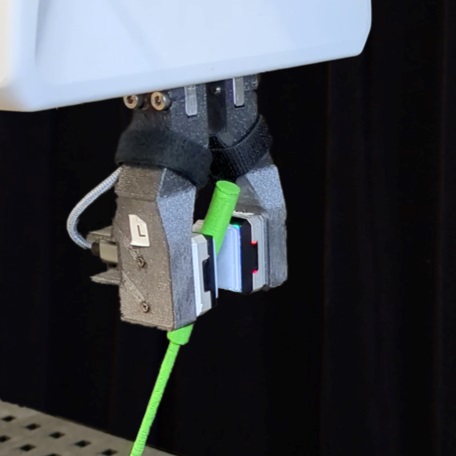
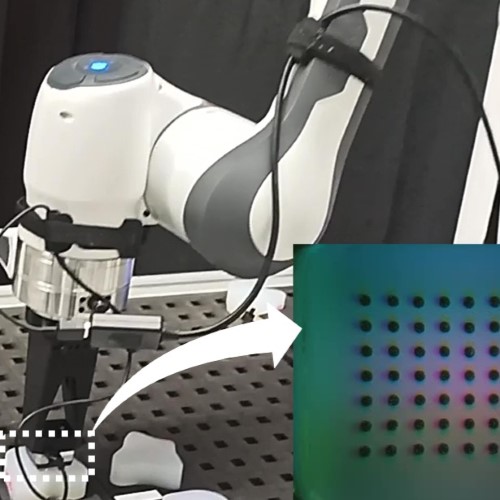
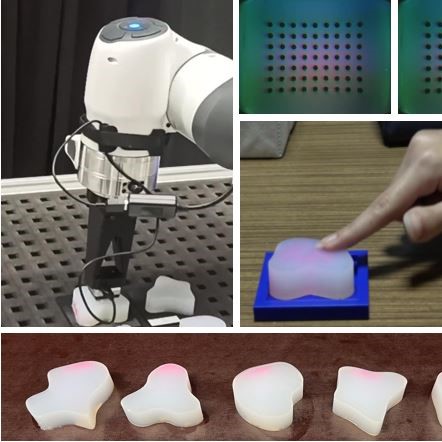
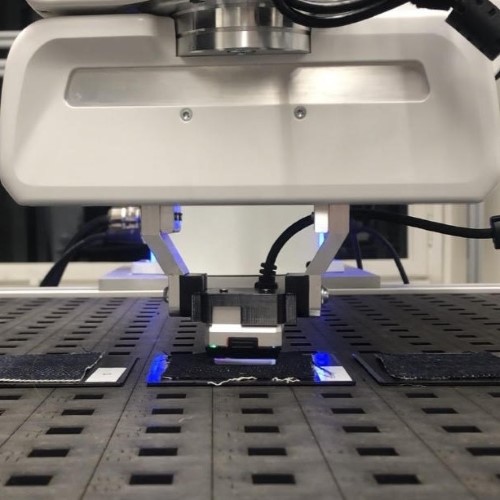
A key challenge in robotics is accurately perceiving the properties of objects, and touch plays a vital role in this process. In this project, we explore techniques for robotic perception of object properties, such as texture and hardness, using Vision-Based Tactile Sensors (VBTS). VBTS offer a cost-effective, high-resolution alternative to conventional tactile sensors by leveraging advancements in camera technology and computer vision. Additionally, we examine the exploratory procedures humans employ to identify object properties through touch, using these insights to develop robotic exploratory procedures and active sampling techniques for tactile perception of object properties.
Publications

Lin, L.P.Y., Kshirsagar, A., Belousov, B., Schneider, T., Peters, J., Doerschner, K., & Drewing, K., Exploration Strategies and Feature Prioritisation in Contour-based Haptic Perception of 2D Shape, IEEE Transactions on Haptics, 2026
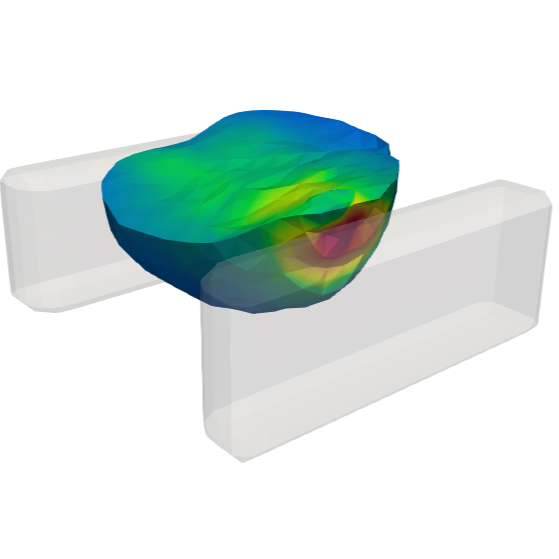
Duret, G., Heller, F., Mazurak, D., Kshirsagar, A., Schneider, T., Zara, F., Peters, J., & Chen, L., Real-Time Simulation of Deformable Tactile Sensors and Objects in Robotic Grasping using Graph Neural Networks with Inductive Biases, IEEE-RAS International Conference on Soft Robotics (RoboSoft), 2026
🏆Best Student Paper Award Finalist
Heller, F., Kshirsagar, A., Schneider, T., Duret, G., & Peters, J., Inductive Biases for Predicting Deformation and Stress in Deformable Object Grasps with Graph Neural Networks, Workshop on Robotic Manipulation of Deformable Objects at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025

Nguyen, D.H., Schneider, T., Duret, G., Kshirsagar, A., Belousov, B., & Peters, J., TacEx: GelSight Tactile Simulation in Isaac Sim – Combining Soft-Body and Visuotactile Simulators, German Robotics Conference (GRC), 2025
Nonnengießer, F., Kshirsagar, A., Belousov, B., & Peters, J., Visuotactile In-Hand Pose Estimation, German Robotics Conference (GRC), 2025
Chen, J., Kshirsagar, A., Heller, F., G´omez Andreu, M., Belousov, B., Schneider, T., Lin, L. P. Y., Doerschner, K., Drewing, K., & Peters, J., Active Sampling for Hardness Classification with Vision-Based Tactile Sensors, German Robotics Conference (GRC), 2025
Nguyen, D.H., Schneider, T., Duret, G., Kshirsagar, A., Belousov, B., & Peters, J., TacEx: GelSight Tactile Simulation in Isaac Sim – Combining Soft-Body and Visuotactile Simulators, Workshop on Learning Robot Fine and Dexterous Manipulation: Perception and Control at Conference on Robot Learning (CoRL), 2024
Kshirsagar, A., Heller, F., G´omez Andreu, M., Belousov, B., Schneider, T., Lin, L. P. Y., Doerschner, K., Drewing, K., & Peters, J., Hardness Similarity Detection Using Vision-Based Tactile Sensors, 40th Anniversary of the IEEE International Conference on Robotics and Automation (ICRA@40), 2024
Lin, L., Boehm, A., Belousov, B., Kshirsagar, A., Schneider, T., Peters, J., Doerschner, K., & Drewing, K. , Task-Adapted Single-Finger Explorations of Complex Objects, Eurohaptics Conference, 2024
Boehm, A., Schneider, T., Belousov, B., Kshirsagar, A., Lin, L., Doerschner, K., Drewing, K., Rothkopf, C.A., & Peters, J., What Matters for Active Texture Recognition With Vision-Based Tactile Sensors, IEEE International Conference on Robotics and Automation (ICRA), 2024
Boehm, A., Schneider, T., Belousov, B., Kshirsagar, A., Lin, L., Doerschner, K., Drewing, K., Rothkopf, C.A., & Peters, J., Tactile Active Texture Recognition With Vision-Based Tactile Sensors, NeurIPS Workshop on Touch Processing: a new Sensing Modality for AI, 2023